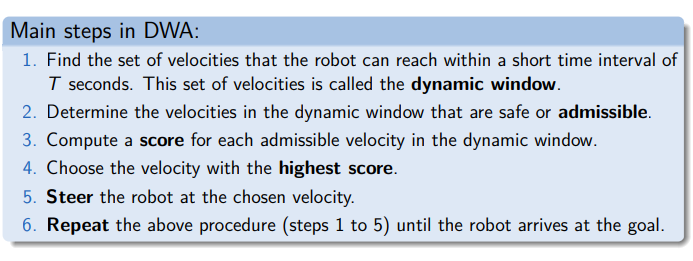
Main Steps
Velocity Space


⇒ Admissible: Grey Area, Non Admissible: Brown Area

⇒ white Box
Objective function F(v, ω)
The objective function F(v, ω) evaluates trajectories based on three criteria:
- Closeness to goal pose: How close to the goal pose would this trajectory bring the robot?
- Clearance from nearest obstacles: How far is the nearest obstacle on this trajectory?
- Speed of motion: How fast does the robot move on this trajectory? I The objective is to drive in the correct direction as fast as possible while staying as far away from obstacles as possible.
Strengths and Weaknesses

Strength:
Fast approach for Obstacle Avoidance.
Weakness:
Difficulty to enter narrow passages and doorways (robot does not stop on time).
Improved DWA:
Optimize position and velocity simultaneously.