Grid Maps
- Geometric model of the environment.
- The 2D world plane is divided into grid cells.
- Map cells can be free or occupied.
- The robot can only navigate in the free cells.
- It is a dense representation of the world. I Suitable for indoor environments.
Occupancy Grid Maps
Binary cells
either free or occupied
Probabilistic cells
The cell occupancy is modelled by a binary random variable.
Map occupancy probabilities:
- Free cell:
- Occupied cell:
- No knowledge:

Assumptions:
- Cells are independent of each other.
- Range measurement only depends on current robot pose (Markov property)
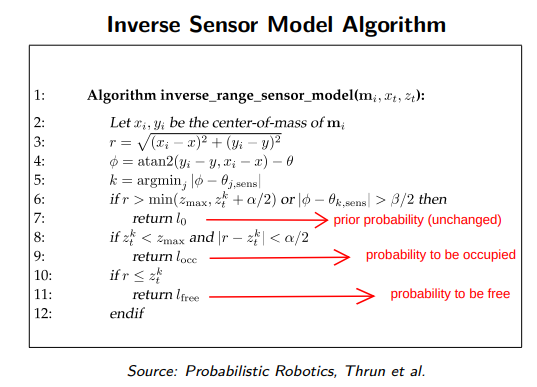
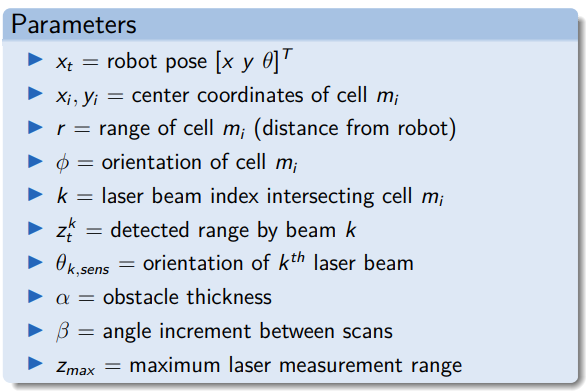
Algorithm

Possible states
- p_occupied
- p_prior (unchanged)
- p_free
Inverse Sensor Model