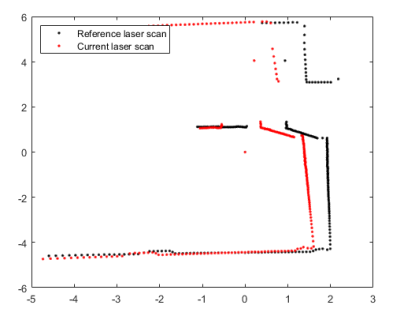
Incrementally align two consecutive laser scanner measurements. Stitch the laser scans to create a map. The transformation between two measurements is used in robot Localization. Example: Interactive closest Point