A Brute-force Approach
Given: Graph, start node, goal node.
- Begin search at the start node and do a test for goal.
- If start is same as goal, then stop search.
- Otherwise, continue search.
- Visit the adjacent nodes of start and test whether any of them is goal.
- If goal not found, then continue search at the adjacent nodes of the nodes visited in previous step. Skip any node that has already been visited.
- Continue Step 3, until either the goal is found or until all nodes that can be reached from start node have been visited.

Exhaustive or brute-force search strategy
- Enumerate systematically all possible candidates and test if any of them is the goal.
- In breadth-first search, all paths of length ‘n’ from start are
Inplementaion
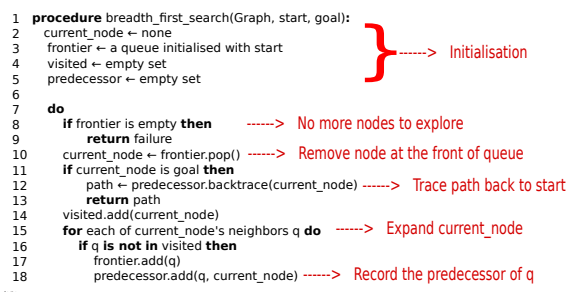
Creates and maintains three lists:
- A list of visited nodes. I These nodes have failed the test for goal node.
- A list of frontier nodes. I Frontier nodes are the neighbours of already visited nodes that have not been visited (goal-tested) yet.
- A list of predecessor nodes. I Predecessor is recorded when a node is expanded, i.e. when its neighbours are added to the frontier list.
Pros
- Simple and easy to implement.
- If a path exists from start to goal, it will always find the shortest path (complete and optimal).
- Suitable for smaller grids (fewer cells).
Cons
- Searches ‘blindly’. Only adjacency or neighbourhood information is used. (Uninformed search)
- Inefficient, especially for large grids populated sparsely with obstacles.