Erfassen und Messen
Erfassen
Aufnahme von Signalen
Wandlung in digitale Messdaten
Verarbeitung durch Software
siehe:
Link to original
Messen
Messen
Eine experimentelle Bestimmung eines Messwertes durch quantitativen Vergleich der Messgröße mit einer Vergleichsgröße
Messgröße
Die jenige physikalische Größe (Masse, Leistung, Temperatur), deren Wert bestimmt wird.
Link to originalMesswert
Der Messwert ist der von einem Messgerät/ einer Messeinrichtung gelieferter Wert einer Messgröße, ausgedrückt durch das Produkt.
Link to original
Messfehler
Abweichung des Messwertes von der Messgröße
Link to original
vs
Link to original
Erfassen

Schall
Schall wird durch schwingende (vibrierende) Materie erzeugt
(Schallquelle, wie z.B. Gitarrensaiten, Lautsprechermembran)
→ Um Materie in Schwingung zu setzen, muss Energie aufgewendet werdenDie Partikel schwingen entlang der Ausbreitungsrichtung – solche Wellen nennt man Längswellen oder Longitudinalwellen 1
-
Luftschallwellen breiten mit ca. 330m/s als Longitudinalwellen aus
→ schneller bei höherer Dichte (Wasser, Metall) -
Die Amplitude 1 (Luftdruckänderung in Pascal) bestimmt die Lautstärke
-
Die Frequenz (Anzahl der Druckänderungen pro Sekunde in Hertz) bestimmt die Tonhöhe
-
Wird in Dezibel angegeben
-
2x Abstands → 4x Fläche
- -6 dB
-
In geschlossen Räumen sind das Verhältnis von Direktschall und Reflexionen (Nachhall 1) wichtig für die Hör-/Aufnahmequalität
→ Detektor nahe bei Schallquelle: Direktschall überwiegt
→ Detektor weiter weg: Summe der Reflexionen überwiegt -
Achtung nicht Echo – Echo → separates Hörereignis.
Ton
Signal mit genau einer Frequenz
Link to original
Klang
besteht aus mehr als einer Frequenz:
Grundschwingung und Obertöne
Link to original
(ganzzahliges Vielfaches der Grundfrequenz)
Geräusch
enthält viele verschiedene Frequenzen
Link to original
Mikrofone
Mikrofone
Bauform
- Akustische Bauform
- Druckmikrofon folgt dem Schalldruck (ungerichtetes Mikrofon)
- Druckgradientenmirkofon folgt dem Schalldruckgradient (gerichtetes Mikrofon)
- Wandlerprinzip
Passive Wandlung
(produziert selbst Strom durch Schall)
- Dauermagnet → Dynamische Mikrofone (Wandlung durch Induktion)
- Gleichspannungsquelle → Niderfrequenz-Kondensatormikrofon
- Elektretfolie → Elektret-Kondensatormikrofon
- Innere Polarisationsspannung → Piezomikrofon
Aktive Wandlung
(verändert Strom abhängig vom Schall)
- Gelichstrom-gespeister HF-Oszillato → Hochfrequenz-Kondenstormikrofon
- Gelichstromquelle → Kohlemikrofon (Wandlung durch Widerstand)
Mirkofone-Arrays
Link to original
Körperschall Mikrofone

Kondensatormikrofon
Akustische Bauform
Link to original
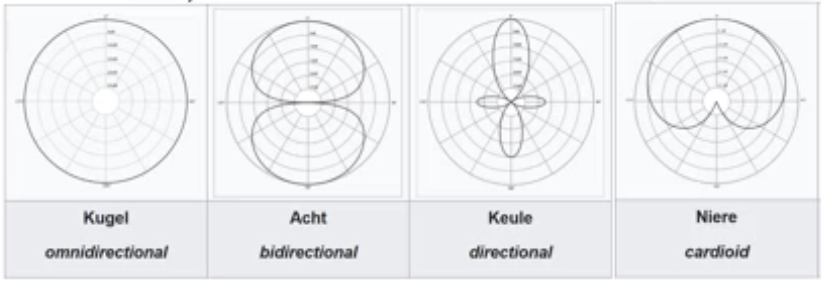
Richtcharackterisktik → Empfindlichkeit des Mikrofone
Kugel (Omnidirektional) → nehemen gesamte Szene wahr
Acht → nicht so sher von Seiten
Keule → Richtmikrofone, Schall-Lokalisierung, in die Ferne
Niere → nur in eine Richtung
Entwicklung von Sensorverabeitungssystemen
Entwicklung von Sensorverabeitungssystemen
Zwei Ebenen
Link to original
- Entwurfs Ebene
→ Von den anschaulichen Aufforderung zur mathematischen Spezifikation- Implementierungs Ebene
→ Von mathematischen Spezifikation zu Redeverhalten / Code

Bildaufnahme
Lichtstrahlen → Elektrischen Signal → Digitales Signal
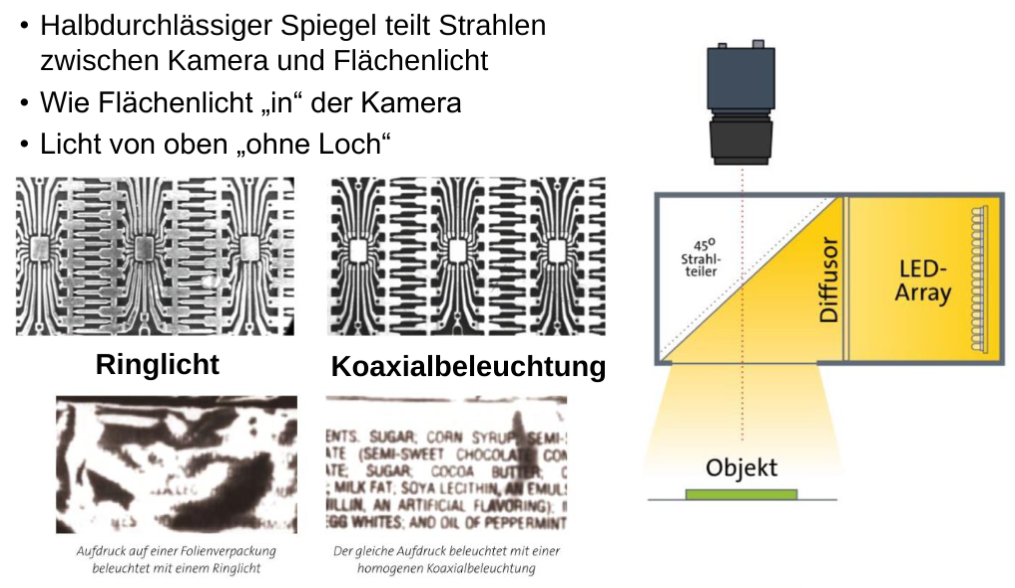
Beleuchtung
Diffusor
veteilt Licht gelichmäßig
Link to original

Koaxialbeleuchtung
Link to original
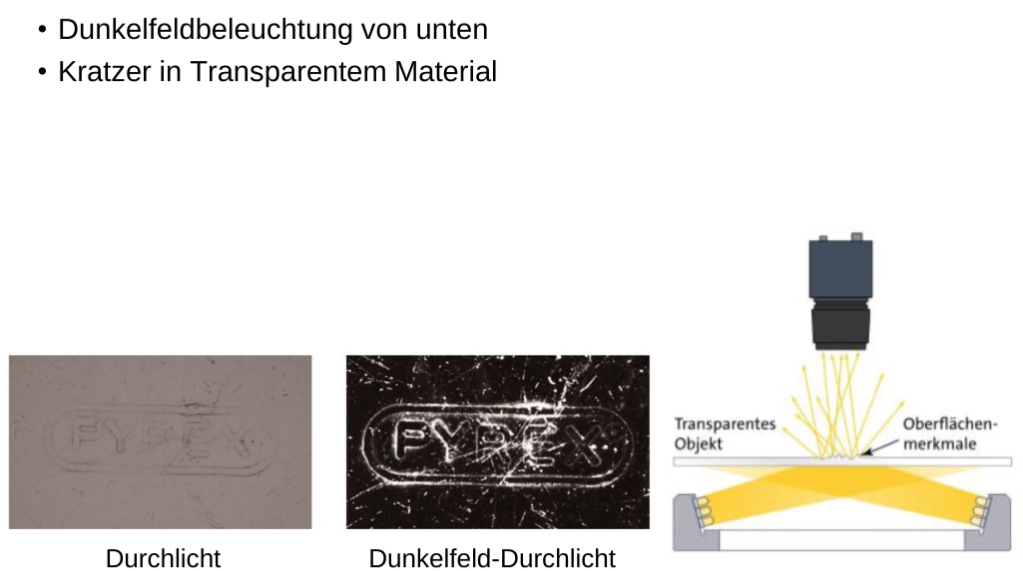
Dunkelfeldbeleuchtung
Link to original

Durchlicht 1
Link to original

Dunkelfeld-Durchlichtbeleuchtung 1
Dunkelfeldbeleuchtung
Link to original
Durchlicht 1
Objektiv
Brennweiten
Dieselbe Szene mit 80°, 45° und 15° Öffnungswinkel
Mensch 170°
Link to original
Verzerrungen bei über 45°

Linsenkamera
Link to original

kleine Blendenöffnung → große Blendenzahl → große Schärfentiefe
große Blendenöffnung → kleine Blendenzahl → kleine Schärfentiefe
Polarisation
siehe Licht
Licht schwingt quer zum Lichtstrahl
- Zwei unabhängige Ebenen der Schwingung
Polarisationsfilter lässt nur eine Ebene durch
- 3D Brillen im Kino (eine Ebene für jedes Auge)
Link to original

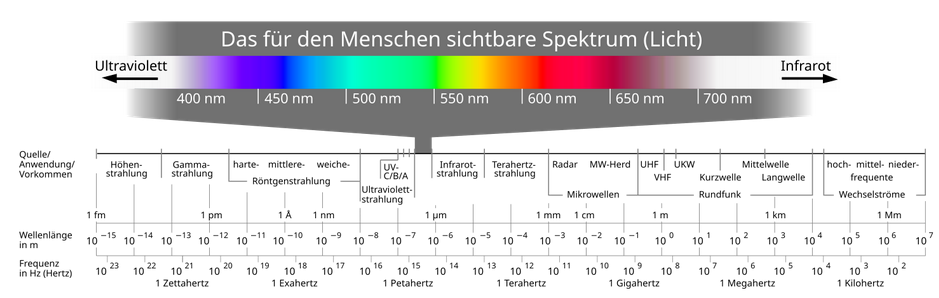
Farbe
Elektromagnetisches Spektrum
UV Farbe NIR IR FIR MW KW MW LW NF Nahes Infrarot Mittleres Infrarot Fernes Infrarot Dezimeterwellen Zentimeterwellen Millimeterwellen Kurzwelle Mittelwelle Langwelle Gammastrahlen Röntgenstrahlen Ultraviolettstrahlung Licht Infrarotstrahlung Mikrowellen Radiowellen Niederfrequenz Fluoreszenz, Schwarzlicht sichtbar Fernbedienung ThermografieWärmestrahler (100 - 700°C) Wärmestrahler(Raumtemperatur) 5G, WLAN, Radar Fernsehen, 2G, 3G UKW Induktionskochfeld Wellenlänge ist der Abstand zwischen zwei Hochpunkten
Link to original
Bildsensor
Farbiger Bildsensor
Link to original

Shutter
Belichtungszeit
Link to original
- elektronisch steuerbar
- an/abschalten des Aufsammelns von Licht
Segmentierung in Bildern
Gruppierung → Kennzalen → Filter & Klassifikation
Helligkeitssegmentierung
→ Klassifikation für Pixel mit Grenzwert
Farbsegmentierung
Pixel Klassifizieren mit Farbgrenz wert
- Hue
- Saturation
- Value

oder Hintergrund erkennen und invertieren.
Berührende Objekte trennen
Problem
Lösung
Morphologie
Link to original
Link to originalWasserscheidentransformation
Link to original







Fourier-Transformation

Inverse Fourier-Transformation → lässt sich invertiern keine Informationen gehen verloren.
Zeitdiskrete Fourier-Transformation
- Nomiert Frequenzen des digitalen Signal auf Bereich
- Nur Frequenz der halben Abtastrate (Nyquist-Frequenz) sind kontinuierlich
- Max Frequenz im digitalen Signal ←> Nyquist-Frequenz im kontinuierlichen Signal
- analysiert welche Frequenzen enthalten sind, aber nicht zu welcehm Zeitpunkt ⇒ SDTFT
- Implementierung Fast Fourier Transform
Spektrogramme
→ Dabei überlappen sich die Segemente (gewollt)
→ Fensterfunktion: Hammingfenster
→ Zu kurzes Fenster → Ungenaue Frequenzbereich
→ Zu langes Fenster → Ungenauer Zeitbereich
⇒ Daher Fensterlänge abhängig von der AnwendungLink to original

2D Fourier-Transformation

Filter



Lineare Filter 2D
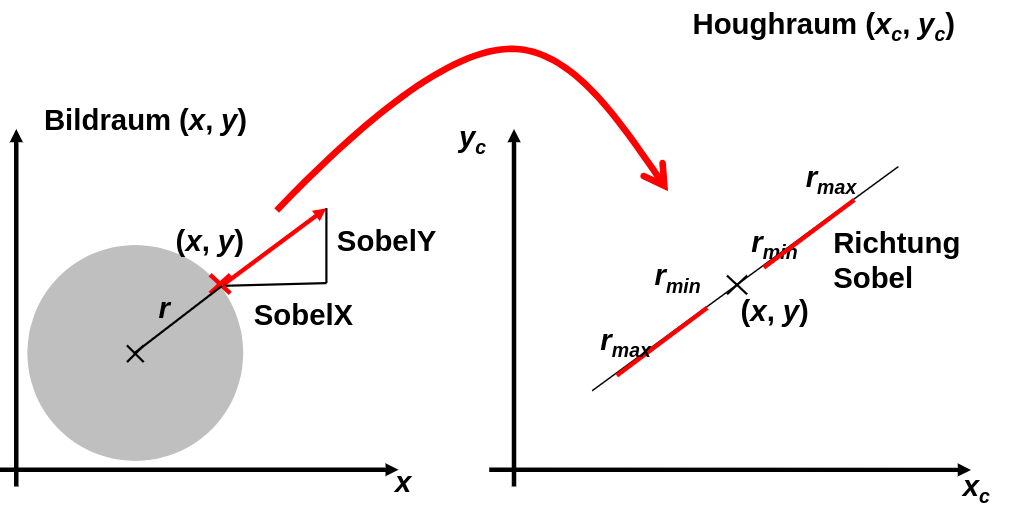
Sobel-Filter
3x3 Feld zu Pixel

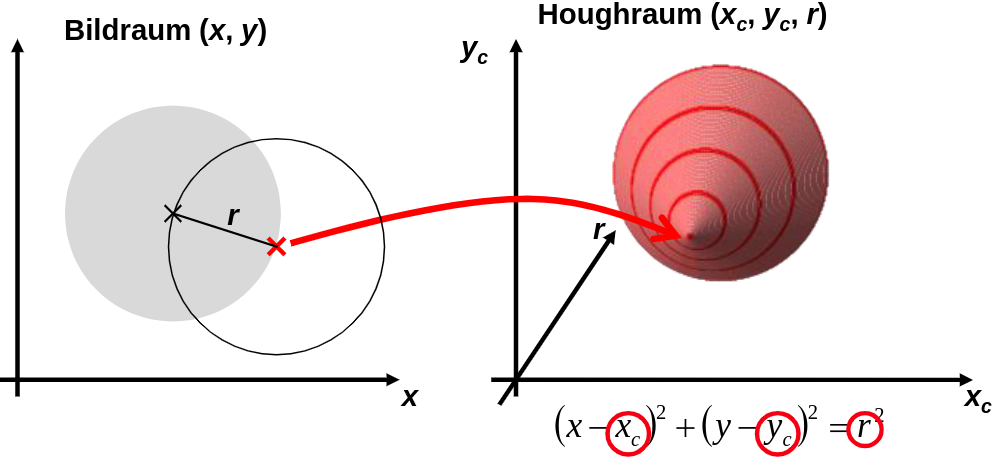
Hough Algorithmus
8x8 Feld zu 2x2 Feld
und überlappende 2x2 Felder auf Länge 1 normieren
Normal


Mit Sobel-Filter

Sensordatenverarbeitung Paradigma
⇒ keine frühen Entscheidungen
Transformationsmatrix

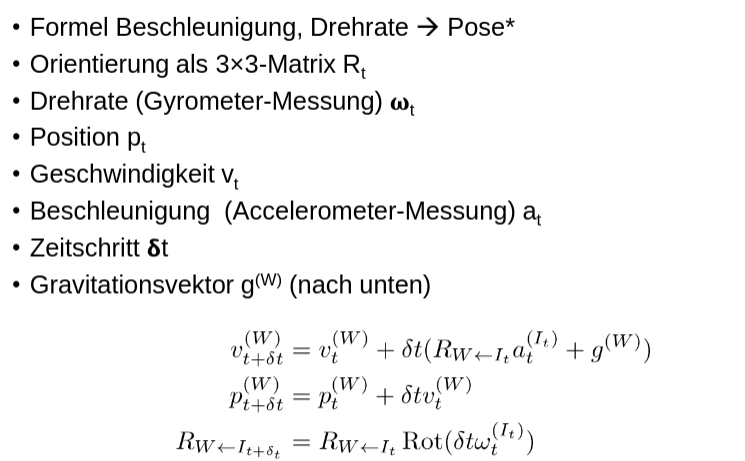
IMU Motion Capturing
Accelerometer
- Position
- Geschwindigkeit
- Beschleunigung (Accelerometer-Messung)
- Zeitschritt
- Weltkoordinaten:
- Initalisirungskoordinaten (ohne Gravitation):
siehe: RDL VL 03 Sensors
Link to original




Gyrometer
siehe auch RDL VL 03 Sensors
Link to original




IMU Motion Capturing
Inverate Merkmale
Merkmal ändert sich nicht bei Transformation
Link to original
- Varianz des Betrags
- Mittelwert von
Koverate Merkmale
Merkmal nur gelich bei selber Transformation
Link to original
- komponentenweiser Mittelwert
Initialsensor
Orientierung
Was ist empfelen?
fest & sinntragend fest wechselt zwischen Nutzungen ändert sich ständig Invariante Merkmale x x x x Kovariante Merkmale x x Merkmale die beides nicht sind. x Auf ein sinntragendes festes Koordinatensystem umrechnen. x x x fest & sinntragend
fest
wechselt zwischen Nutzungen
ändert sich ständig
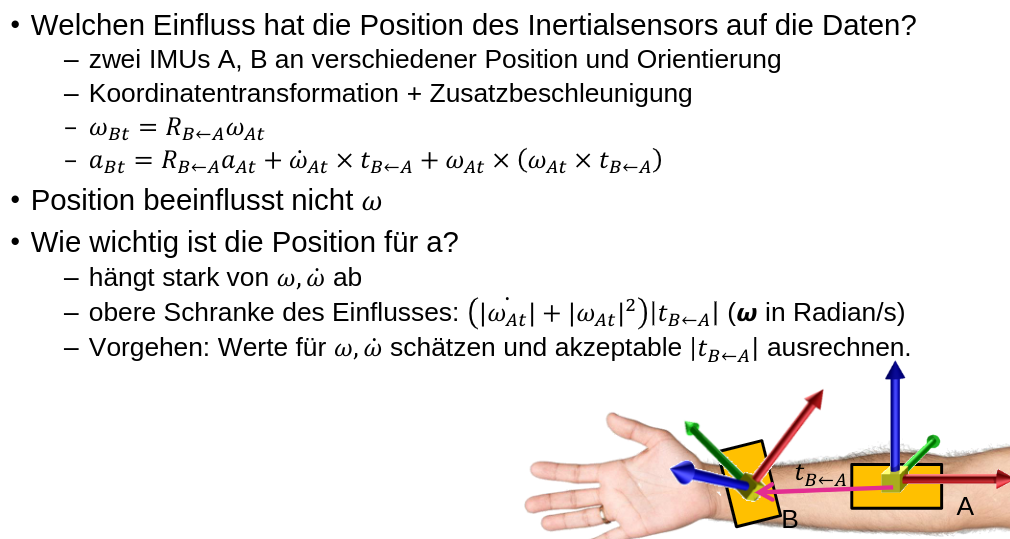
Zwei IMUs
Link to original








Merkmalsextraktion
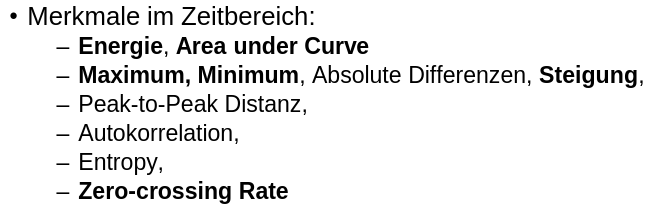
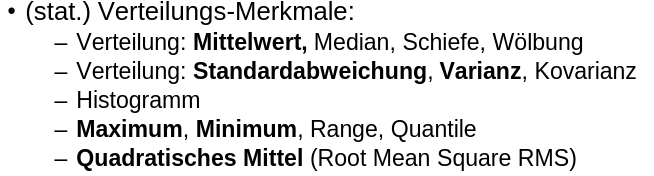
Windowing


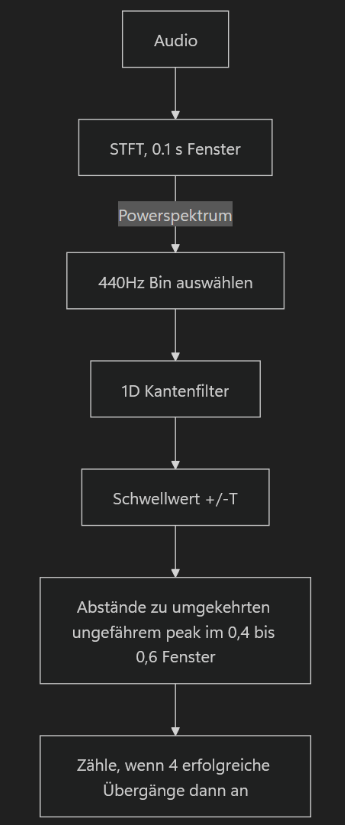
Audioaufzeichnung und verabeitung

Anlog Signal zu Spektrogramm
analoges Audiosignal → abtansten → Quatisierung → Windowing → DTFT → Spektrogramme
→ Dabei überlappen sich die Segemente (gewollt)
Link to original
→ Fensterfunktion: Hammingfenster
→ Zu kurzes Fenster → Ungenaue Frequenzbereich
→ Zu langes Fenster → Ungenauer Zeitbereich
⇒ Daher Fensterlänge abhängig von der Anwendung
Sound im Audiosignal erkennen
Wenn entscheidungen erst am Ende getroffen werden sollen:
⇒ Sensordatenverarbeitung Paradigma
Link to original


Sprache erkennen in Audiosignal erkennen
In analogem Signal kann erkannt werden:
- Lautstärke
- Pausen
- Hintergrundgeräusche
In analogem Signal kann nicht erkannt werden:
Worte
Stimmart
Mit Spektrogramme erkannt werden
- Stille
- Frikativ (s, f, v)
- Die Frequenz ist höher, da durch das Pressen der Laute zwischen Zähnen
- Plosiv (p, t, k, b, d, g)
- Am Anfang einen glottalen Verschluss (es kommt also keine Luft durch), daher die Unterbrechung der Energie, sichtbar durch einen schwarzen Streifen)
- Vokale (a, e, u, o)
- die Frequenz der Stimmenbänder gut sichtbar
- Nasal (n, m)
ähnlich wie Vokal nur weniger Energie
Beispiel “KO” und “Ok”
Link to original
- Im Spektrogramme klarer unterschied
- Im DTFT allerdings nicht (DTFT analysiert welche Frequenzen enthalten sind, aber nicht zu welcehm Zeitpunkt)

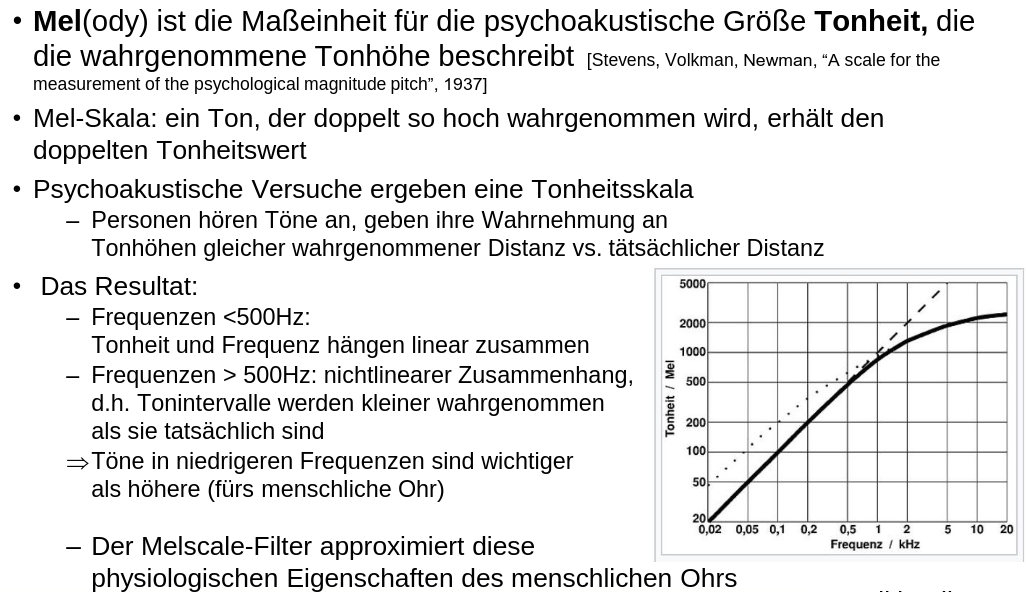
Mel-Skala und Cepstral Koeffizienten
Modell von Sprache
siehe auch:
Link to original
Cepstral Koeffizienten


Mel-Skala
Sprache wird höhe wird im Gehör nicht linear wahrgenommen
< 500 Hzlinear
> 500 Hznicht linear
Link to original

Cepstral Koeffizienten
Mel-frequency Cepstral Coefficients
Link to original

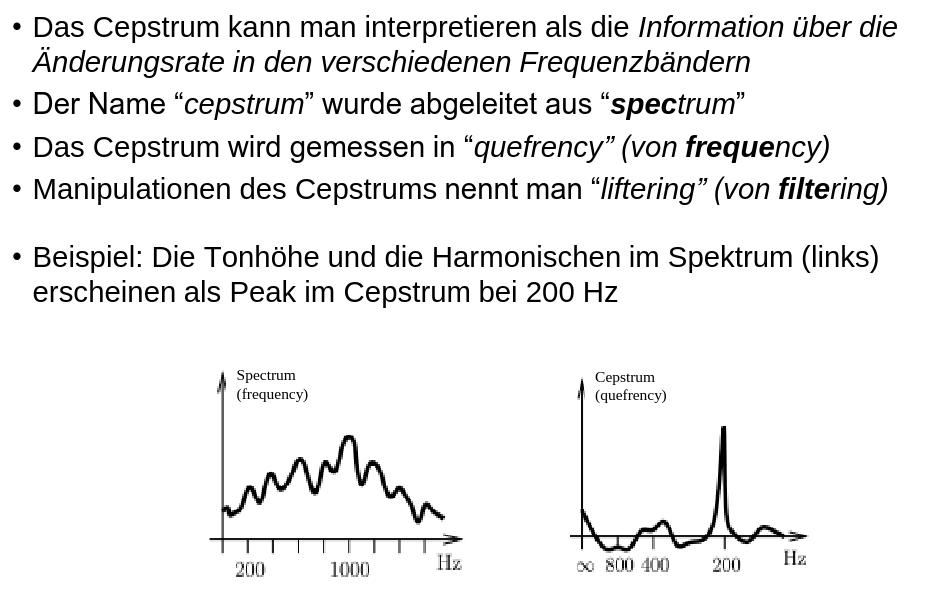

MFCC
Mel-frequency Cepstral Coefficients
Mel-Skala
Cepstral Koeffizienten
Link to original



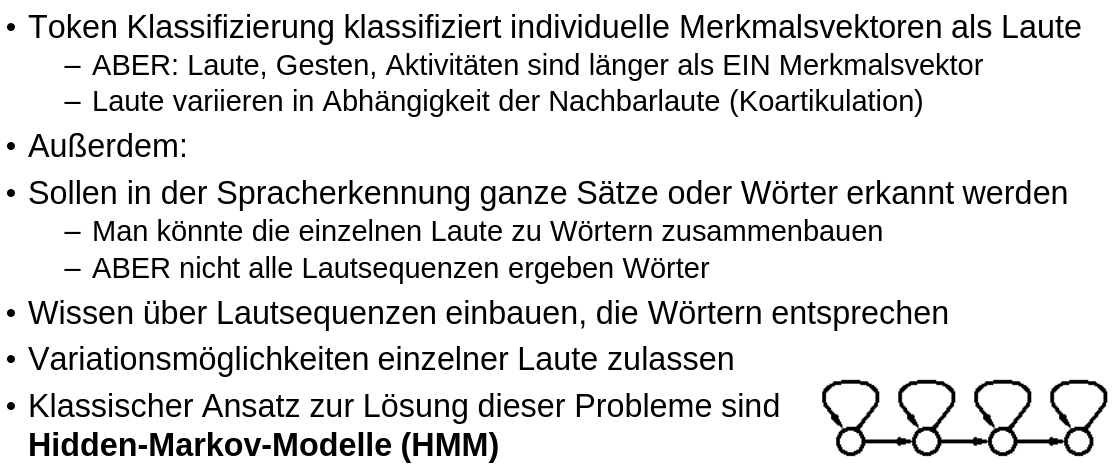
Klassifikation
Hidden-Markov-Modelle
Link to original
Classifier
Classifier
accuracy =
precision =
recall =
jaccard =
Link to original


Machine Learning

Bayes Filter
Häufige Situation: Wahrheit ändert sich über die Zeit (Zustand)
→ Bsp. Position eines Fahrzeugs