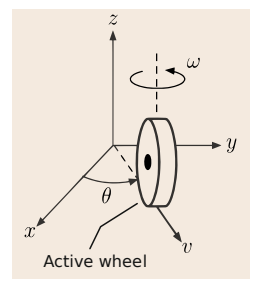
Unicycle Model
-
Composed by a single upright wheel rolling without sideways slip.
-
This type of robot is unstable without dynamic control to maintain balance.
-
The robot state is described by its position (x, y) and orientation θ.
-
We can control its linear velocity v and angular velocity ω.