Definition
“Odometry is the use of data from motion sensors to estimate the change in position over time.”
The word Odometry comes from the Greek words:
hodos meaning travel or journey, and
metron meaning measure.
Odometry is also known as dead reckoning
Odometry Models
Odometry Basic Concept
Odometry is used in robotics by wheeled or legged robots to estimate their position relative to a starting location.
Basic concept:
- Develop a mathematical model of how the motion of the robot’s wheels, joints, etc. induce motion of the vehicle itself.
- Integrate (add up) these motions over time to calculate the robot current position with respect to the previous (initial) location.
What sensors can be used to measure the robot’s motion?
- Wheel Encoder (wheel odometry) → in this lecture
- Joint encoders (leg odometry)
- IMU: Accelerometer and Gyroscope (inertial odometry)
- Camera (visual odometry)
- Laser scanner (lidar odometry)
⇒ Sensor Fusion
The odometry estimation varies by vehicle design:
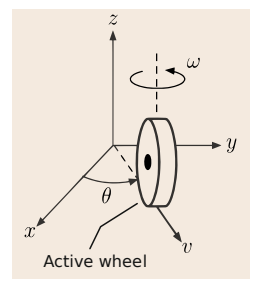
Unicycle Model
Unicycle Model
Composed by a single upright wheel rolling without sideways slip.
This type of robot is unstable without dynamic control to maintain balance.
The robot state is described by its position (x, y) and orientation θ.
We can control its linear velocity v and angular velocity ω.
Link to original
Differential Drive Model
Setup
- It has two driveable wheels which are independently controllable, mounted along a common axis.
- One or more low-friction caster wheels are used to keep the robot horizontal.
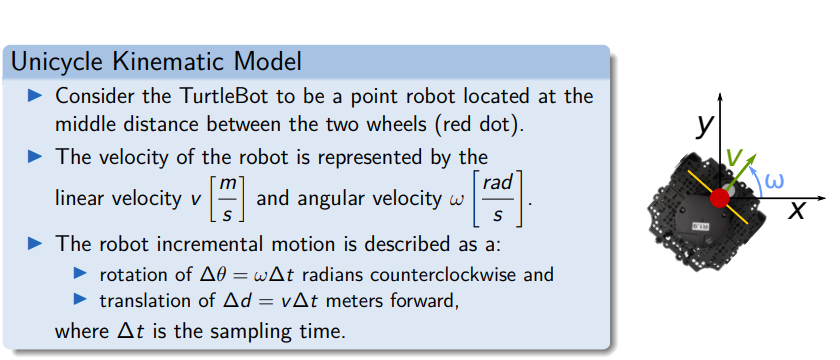
From a point robot to two wheels Instead of a point robot, the TurtleBot is now modeled as a robot with:
- two wheels,
- two motors, and
- a motor controller.
also see: Wheel Encoder
Odometry
Wheel speed
Link to original







Bicycle model
steerable front wheel and active rear wheel
Link to original

Ackermann Steering Model
two fixed active back wheels and two passive front wheels steered at different angles
Link to original

Omnidirectional Model
three or more Swedish wheels.
Link to original

Robot Motion Constraints
Based on the motion they can perform, wheeled robots can be:
- Holonomic (omnidirectional robot)
- Nonholonomic (car-like robot)
This depends in part on the robot wheels type:
- Nonholonomic mobile robots employ conventional wheels without sideways slip.
- Holonomic mobile robots employ Swedish wheels that allow sideways sliding.
